

Xem những con robot tí hon từ Đại học Harvard có thể ghép hình với nhau tạo nên "siêu robot" như thế nào
Một trong những hiện tượng bắt mắt nhất trong tự nhiên là hàng ngàn, thậm chí hàng triệu vật thể nhỏ tạo ra một cấu trúc vật thể khổng lồ. Ví dụ như, một đàn chim cùng tung cánh bay lên một lúc, một đàn cá lớn di chuyển nhịp nhàng trong làn nước hay một đàn kiến kết nối với nhau rồi tạo nên một chiếc cầu, một cái bè vượt sóng nước.
 |
Nhưng đó là về mặt tự nhiên, khi mà mỗi cá thể động vật biết mình đang làm gì, biết vai trò của mình trong bầy đàn như thế nào. Điều đó khá khó khăn với một tập hợp những con robot siêu nhỏ khi chúng bị giới hạn bởi công nghệ, bởi các thuật toán và bởi khả năng kết nối có hạn của chúng.
Nhưng chúng ta vẫn đã có những thành công nhất định. Ta đã có ví dụ về một hệ thống (hay dễ hình dung hơn là một đàn) những chiếc máy bay drone được lập trình riêng rẽ để thực hiện những mục đích khác nhau. Xu hướng lập trình này đã có một bước tiến lớn nữa khi vào năm ngoái, nhóm Nghiên cứu Hệ thống Tự tổ chức đã tạo ra được một hệ thống gồm nhiều con robot có thể tự rời đội hình trong một tập hợp lớn để biến thành những hình dạng khác nhau.
Vào năm ngoái, đúng như bản báo cáo kết quả nghiên cứu chi tiết đã được trình bày, những nhà nghiên cứu tại Đại học Harvard trình diễn thành công hệ thống robot tự động lắp ráp, một hệ thống có thể chỉ là một “mớ hỗn độn” của các con robot tí hon nhưng rồi có thể tự tách ra để có thể ra được hình dáng mong muốn.
 |
Những con robot nhỏ với khả năng "biến hình".
Trong hệ thống của Harvard, 725 con Kilobot đã được thiết kế riêng biệt để mỗi con có thể tự quyết định được chúng sẽ nằm ở vị trí nào một khi mệnh lệnh lắp ráp được đưa ra. Những con robot thừa sẽ tách ra và nằm yên tĩnh bên ngoài rìa hộp đựng.
Điều đáng chú ý ở đây là chúng chỉ được dẫn đường bằng một bóng đèn treo trên cao và chúng cũng chỉ có thể liên lạc được với những con robot khác ở khoảng cách gấp 3 lần đường kính cơ thể chúng, có nghĩa là một con robot chỉ liên lạc được tối đa với 36 con robot ở vị trí khác. Độ chính xác của những kết nối không dây này có thể lên được tới vài mili mét.
Các nhà nghiên cứu chỉ ra rằng phương pháp tự kết hợp và tự phân tách này có rất nhiều điểm lợi, ví dụ như nó không yêu cầu cao về độ chính xác trong phát hiện chuyển động. Trong một tập hợp rất lớn những con robot như vậy, một hệ thống sẽ rất khó có thể theo dõi chuyển động chính xác của một con robot đơn lẻ.
Họ kết luận:
“Kết quả cuối cùng đã chỉ cho chúng ta thấy rằng thuật toán tự tháo rời có thể được áp dụng lên rất nhiều hình dáng khác nhau và vẫn có một độ chính xác tốt và một hiệu quả lớn. Nó sẽ là một hệ thống rất hữu dụng trong tạo lập đội hình robot và vào việc sản xuất những vật liệu có thể lập trình được”.
Trong tương lai, họ hi vọng rằng thuật toán có thể cho phép những con robot di chuyển theo những đường đi ngẫu nhiên, chứ không đơn giản là đi ra xa hay tiến lại gần nguồn sáng như hiện tại. Một khi đạt được sự phức tạp của một chuyển động ngẫu nhiên, ta sẽ có thể có được những hình dáng khác, một hệ thống phức tạp hơn trong tương lai.
Tham khảo Motherboard
Dink
Tin bài liên quan
Các tin bài khác

Thời tiết hôm nay (29/6): Hà Nội mưa to, khả năng xảy ra lốc, sét

Thời tiết hôm nay (25/6): Bắc Bộ nắng nóng gay gắt, tối và đêm có mưa rào

Thời tiết hôm nay (ngày 15/6): Bắc Bộ ngày nắng, chiều tối có mưa giông
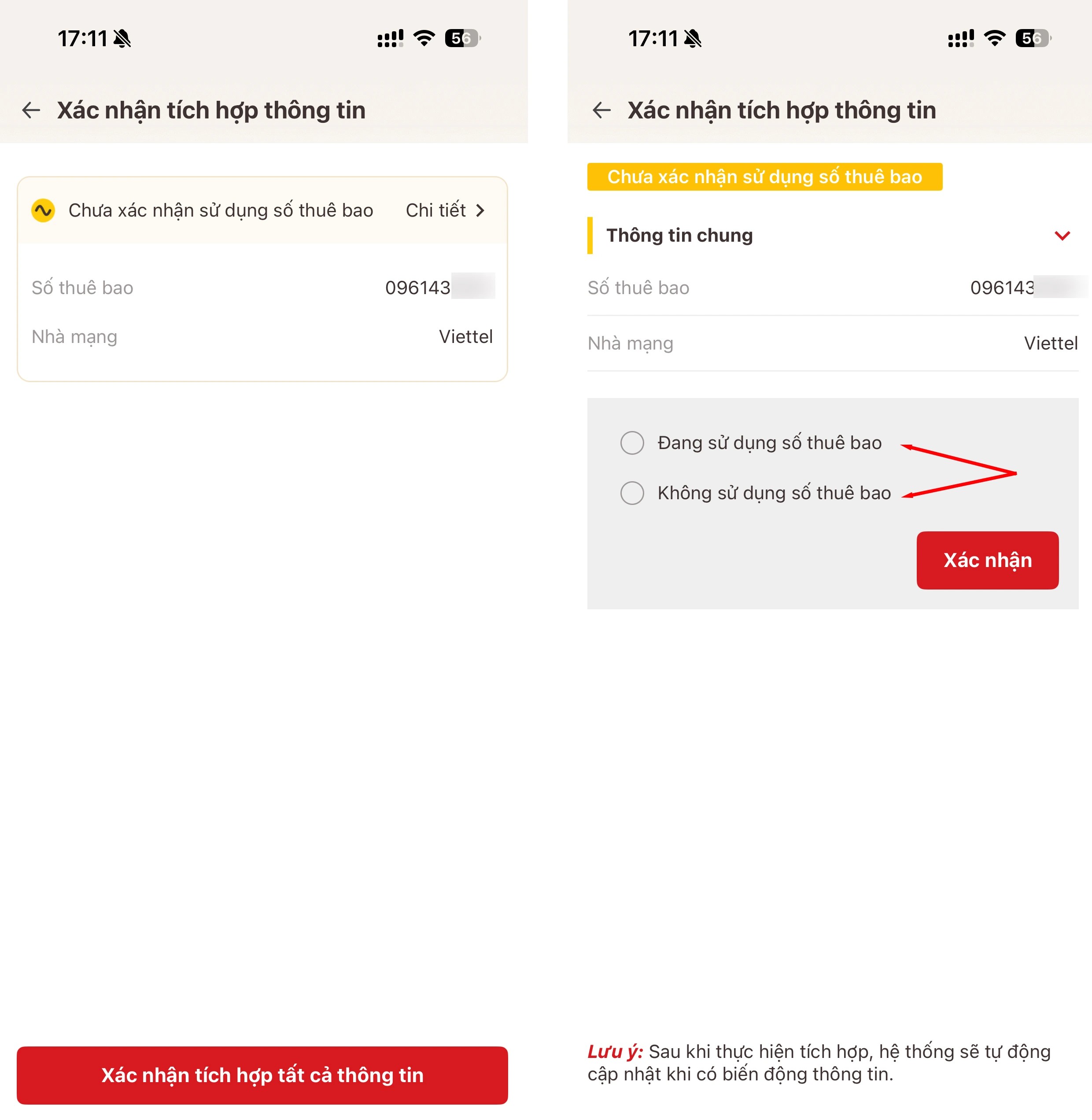
Người dùng cần xác nhận thuê bao trên VNeID trước 15/6 để tránh bị khóa một chiều




Đọc nhiều

Vun đắp tình hữu nghị qua Chương trình Giao lưu sĩ quan trẻ biên giới Việt Nam - Lào

Chiến dịch 500 ngày đêm tại Nghệ An: Đã thu nhận 17.831 mẫu sinh phẩm

Đại sứ Philippines tại Việt Nam: Đối tác Chiến lược Tăng cường mở ra chương hợp tác mới giữa Việt Nam và Philippines

Hàng nghìn người tham dự Lễ hội Văn hóa Việt Nam tại thành phố Wroclaw, Ba Lan
Bờ cõi biển đảo
Miền đất - Con người Cuộc sống vùng biên Nhịp sống biển đảo Lịch sử chủ quyền Giao lưu hữu nghị

Lữ đoàn 169 tham gia lấy mẫu hài cốt liệt sĩ phục vụ giám định ADN tại Đặc khu Vân Đồn

Sự hiện diện của Việt Nam tại ITLOS gửi thông điệp mạnh mẽ về thượng tôn pháp luật

Trường Sa: Mỗi gia đình là một “cột mốc sống” nơi đầu sóng

Đối ngoại nhân dân Thủ đô hướng tới kết nối hiệu quả nguồn lực người Việt Nam ở nước ngoài
![[Video] Trẻ em Đông Á cùng kiến tạo giải pháp cho những thách thức chung](https://thoidai.com.vn/stores/news_dataimages/2026/062026/27/16/video-tre-em-dong-a-cung-kien-tao-giai-phap-cho-nhung-thach-thuc-chung-20260627160309.jpg?rt=20260627160313?260627054406)
[Video] Trẻ em Đông Á cùng kiến tạo giải pháp cho những thách thức chung
![[Video] Âm nhạc flamenco gắn kết văn hoá Việt Nam - Tây Ban Nha](https://thoidai.com.vn/stores/news_dataimages/2026/062026/17/09/croped/chu-o-ng-tri-nh-ho-a-nha-c-flamenco-cover20260617092314.jpg?260617111023)
[Video] Âm nhạc flamenco gắn kết văn hoá Việt Nam - Tây Ban Nha
![[Video] Trao tặng Kỷ niệm chương "Vì hòa bình, hữu nghị giữa các dân tộc" cho Đại sứ Hungary tại Việt Nam](https://thoidai.com.vn/stores/news_dataimages/2026/062026/13/11/croped/ds-hungary-cover20260613111436.jpg?260613052549)
[Video] Trao tặng Kỷ niệm chương "Vì hòa bình, hữu nghị giữa các dân tộc" cho Đại sứ Hungary tại Việt Nam
![[Video] Nhân dân Việt Nam luôn trân trọng tình cảm của nước Nga](https://thoidai.com.vn/stores/news_dataimages/2026/062026/12/15/t6-12-quoc-khanh-lien-bang-nga-cover20260612155154.jpg?rt=20260612155158?260613080300)
[Video] Nhân dân Việt Nam luôn trân trọng tình cảm của nước Nga

Video: Cơ hội giao lưu quốc tế cho học sinh Việt Nam tại trại hè Artek
![[Video] Đối ngoại nhân dân Thủ đô hướng tới kết nối hiệu quả nguồn lực người Việt Nam ở nước ngoài](https://thoidai.com.vn/stores/news_dataimages/2026/062026/10/16/video-doi-ngoai-nhan-dan-thu-do-huong-toi-ket-noi-hieu-qua-nguon-luc-nguoi-viet-nam-o-nuoc-ngoai-20260610161424.jpg?rt=20260610161459?260610045832)
[Video] Đối ngoại nhân dân Thủ đô hướng tới kết nối hiệu quả nguồn lực người Việt Nam ở nước ngoài
![[Video] Plan International đồng hành cùng thanh thiếu nhi tiên phong ứng phó với biến đổi khí hậu](https://thoidai.com.vn/stores/news_dataimages/2026/062026/09/14/plan-international-dong-hanh-cung-thanh-thieu-nhi-tien-phong-ung-pho-voi-bien-doi-khi-hau-20260609144229.jpg?rt=20260609144235?260609050709)
[Video] Plan International đồng hành cùng thanh thiếu nhi tiên phong ứng phó với biến đổi khí hậu
![[Video] Lào dành ưu tiên hàng đầu cho quan hệ với Việt Nam](https://thoidai.com.vn/stores/news_dataimages/2026/062026/09/08/croped/thu-tu-o-ng-la-o-cover20260609081550.jpg?260609110133)
[Video] Lào dành ưu tiên hàng đầu cho quan hệ với Việt Nam
![[Video] Doanh nghiệp Hoa Kỳ hỗ trợ Việt Nam xác định danh tính người mất tích trong chiến tranh](https://thoidai.com.vn/stores/news_dataimages/2026/062026/02/11/croped/vie-t-my-cover20260602115259.jpg?260602083849)
[Video] Doanh nghiệp Hoa Kỳ hỗ trợ Việt Nam xác định danh tính người mất tích trong chiến tranh
![[Video] Nguyên Phó Chủ tịch nước Nguyễn Thị Bình nhận Huân chương “Ngôi sao Công trạng” của Nhà nước Palestine](https://thoidai.com.vn/stores/news_dataimages/2026/052026/22/21/croped/trao-hua-n-chu-o-ng-cover20260522210759.jpg?260523104103)
[Video] Nguyên Phó Chủ tịch nước Nguyễn Thị Bình nhận Huân chương “Ngôi sao Công trạng” của Nhà nước Palestine
![[Video] GNI khánh thành thư viện KB trị giá hơn 1,9 tỷ đồng tại Tuyên Quang](https://thoidai.com.vn/stores/news_dataimages/2026/052026/22/15/video-gni-khanh-thanh-thu-vien-kb-tri-gia-hon-19-ty-dong-tai-tuyen-quang-20260522152939.jpg?rt=20260522152942?260522084551)
[Video] GNI khánh thành thư viện KB trị giá hơn 1,9 tỷ đồng tại Tuyên Quang
![[Video] Quảng Trị thúc đẩy dinh dưỡng học đường: Đầu tư cho trẻ em từ bữa ăn mỗi ngày](https://thoidai.com.vn/stores/news_dataimages/2026/052026/22/14/video-quang-tri-thuc-day-dinh-duong-hoc-duong-dau-tu-cho-tre-em-tu-bua-an-moi-ngay-20260522144849.jpg?rt=20260522144855?260522084534)
[Video] Quảng Trị thúc đẩy dinh dưỡng học đường: Đầu tư cho trẻ em từ bữa ăn mỗi ngày
![[Video] Dấu ấn của Đại sứ Nicolai Prytz trong thúc đẩy hợp tác, giao lưu nhân dân Việt Nam - Đan Mạch](https://thoidai.com.vn/stores/news_dataimages/2026/052026/21/10/croped/da-i-su-dan-ma-ch-cover20260521101628.jpg?260521045701)
[Video] Dấu ấn của Đại sứ Nicolai Prytz trong thúc đẩy hợp tác, giao lưu nhân dân Việt Nam - Đan Mạch
![[Video] Người bạn Palestine gắn bó hơn 40 năm với Việt Nam nhận Kỷ niệm chương](https://thoidai.com.vn/stores/news_dataimages/2026/052026/21/10/croped/da-i-su-plestine-cover20260521102907.jpg?260521045633)
[Video] Người bạn Palestine gắn bó hơn 40 năm với Việt Nam nhận Kỷ niệm chương
![[Video] Thánh đường Hồi giáo Al-noor - Không gian tôn giáo giữa lòng Hà Nội](https://thoidai.com.vn/stores/news_dataimages/2026/052026/22/14/video-thanh-duong-hoi-giao-al-noor-khong-gian-ton-giao-giua-long-ha-noi-20260522144501.jpg?rt=20260522144507?260522084610)